
Hola amigos técnologos, en nuestra entrada de hoy, montaremos un curioso proyecto en el que con la ayuda de dos servos y un Arduino, moveremos la »muñeca» y los »dedos» de una pinza robótica. La práctica consistirá en programar los servos que dan el movimiento a la pinza de modo que obedezcan el movimiento de dos potenciómetros.
Materiales necesarios
 | Pinza robótica |
 | Servos |
 | Arduino UNO R3 |
 | Protoboard |
 | Potenciómetros |
 | Cables |
Conozcamos mejor la pinza robótica y los servos
Pinza robótica:
La pinza robótica es un mecanismo formado por dos piezas moviles las cuales pueden cerrarse y abrirse ejerciendo cierta presión, para así poder sujetar objetos.
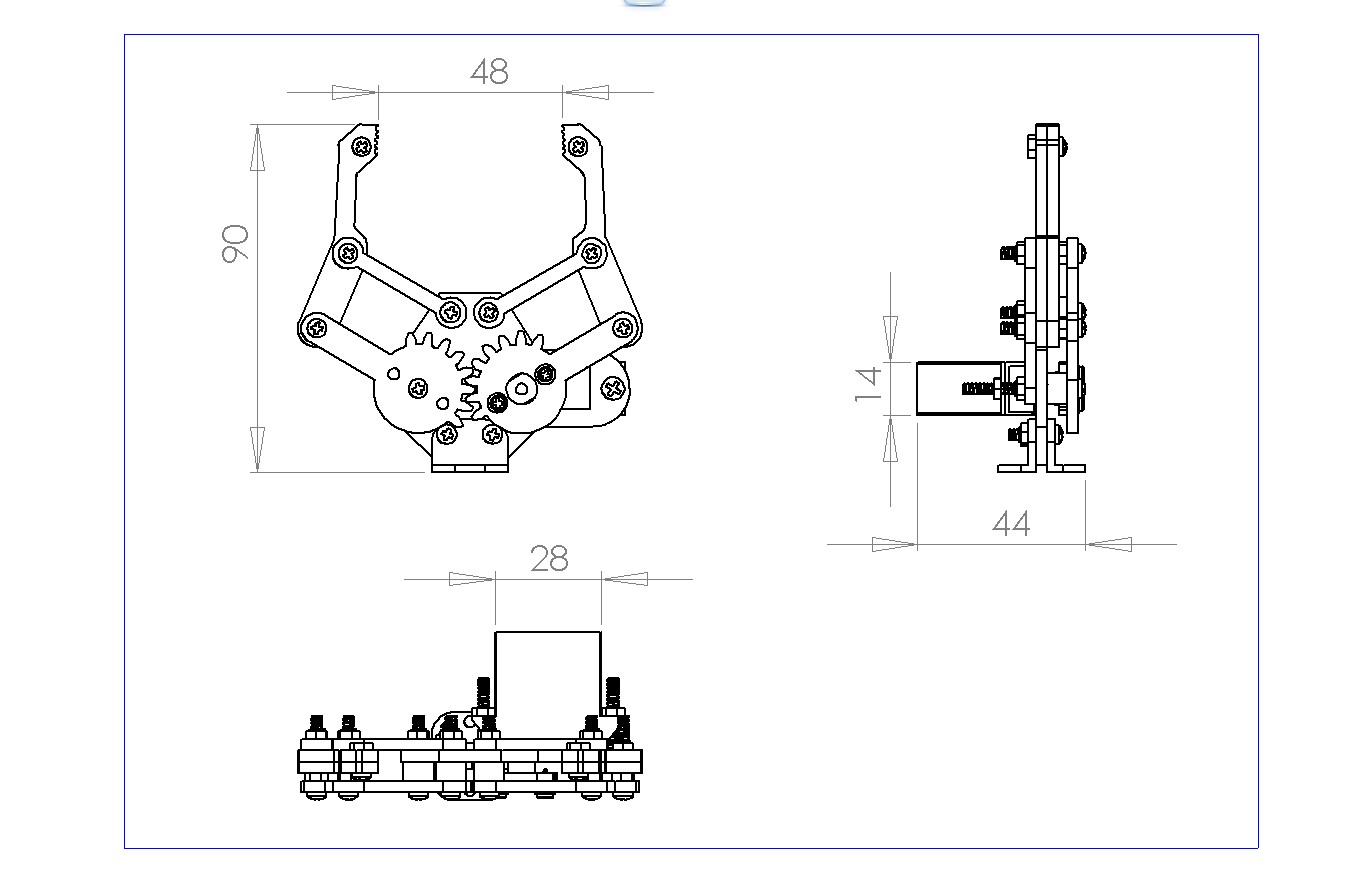
Esta compuesta por piezas de aluminio y estas a su vez ensambladas con tornillos de métrica 3.
Dimensiones de la pinza robótica:
Servos:
Un servomotor es un actuador electrónico, compuesto básicamente por un motor de corriente continua, unos engranajes reductores y una electrónica de control.
Gracias a esta electrónica podemos hacer que el motor tome una posición concreta y ademas se oponga al cambio mecanico de esa posición.
Para ampliar información sobre los servomotores, puede descargarte la siguiente hoja de datos:
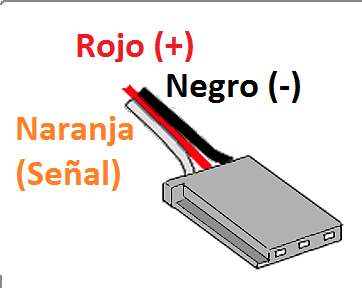
Conexion del servo
Práctica con pinza robótica:
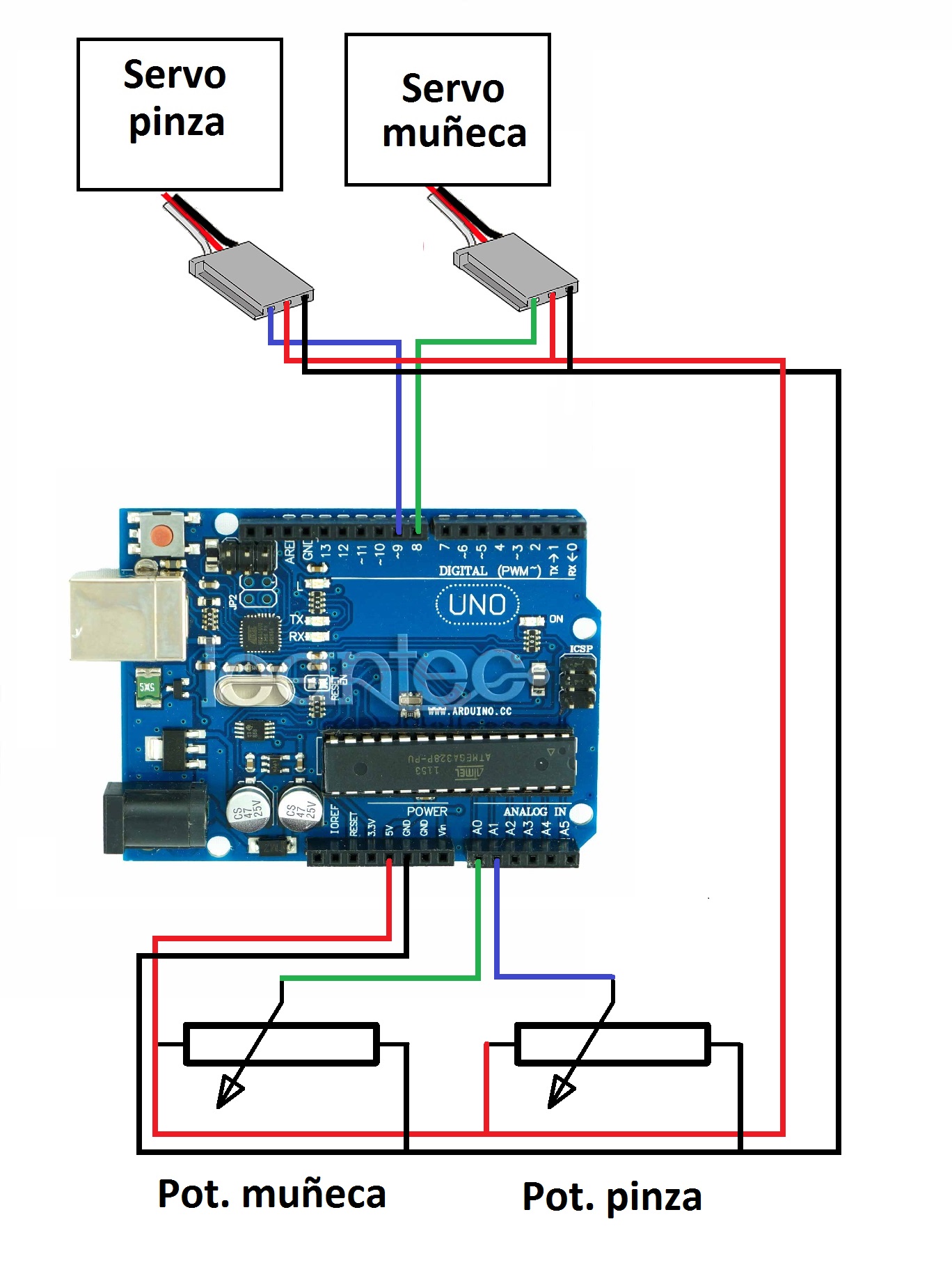
En la práctica de hoy moveremos la muñeca y los dedos de una pinza robótica girando dos potenciometros.
Esquema de montaje
Código de control
#include <Servo.h> Servo servomuneca; //Creamos el servo de la muñeca Servo servopinza; // Creamos el servo de la pinza int angulomuneca = 0;//Creamos la variable angulomuneca int angulopinza = 0;//Creamos la variable angulopinza int valorPotenciometro1 = 0;//Creamos la variable valorPotenciometro1 int valorPotenciometro2 = 0;//Creamos la variable valorPotenciometro2 void setup() { Serial.begin(9600);//Inicializamos el puerto serie servomuneca.attach(8);//Definimos el pin de servomuneca servomuneca.write(90);//Ponemos el servo a 90 grados servopinza.attach(9);//Definimos el pin de servopinza servopinza.write(90);//Ponemos el servo a 90 grados delay(2000);//Esperamos 2 segundos } void loop() { //Lee el valor del potenciometro valorPotenciometro1 = analogRead (0);//Leemos el valor del poten. 1 valorPotenciometro2 = analogRead (1);//Leemos el valor del poten. 2 /*Mapeamos el valor de los potenciometros para que el valor leido siempre este entre 10 y 180 grados y lo guardamos en la variables declaradas para almacenar los ángulos*/ angulomuneca = map (valorPotenciometro1, 0, 1023, 10, 180); angulopinza = map (valorPotenciometro2, 0, 1023, 10, 180); servomuneca.write(angulomuneca);//Damos al servo el ángulo resultante servopinza.write(angulopinza);//Damos al servo el ángulo resultante }





 20x Mini pulsador para PCB 6x6x14 mm 4 pines SPST NO
20x Mini pulsador para PCB 6x6x14 mm 4 pines SPST NO  KIT 100 fusibles 5x20 10 valores + Caja 0.2A 0.5A 1A 2A 3A 5A 8A 10A 20A
KIT 100 fusibles 5x20 10 valores + Caja 0.2A 0.5A 1A 2A 3A 5A 8A 10A 20A  Modulo TTP229 16 canales sensor capacitivo digital tactil arduino
Modulo TTP229 16 canales sensor capacitivo digital tactil arduino  Adaptador recto HDMI TIPO A macho - macho 19 pines
Adaptador recto HDMI TIPO A macho - macho 19 pines  10 METROS Cable AWG24 AMARILLO trenzado
10 METROS Cable AWG24 AMARILLO trenzado  Potenciometro B5K lineal 5k 15mm + Perilla Knob ROJO
Potenciometro B5K lineal 5k 15mm + Perilla Knob ROJO  Alimentador 24V 1A DC Jack 5.5 - 2.1 REF2029
Alimentador 24V 1A DC Jack 5.5 - 2.1 REF2029  Termometro Digital LCD 2 en 1 Redondo temperatura y humedad Negro
Termometro Digital LCD 2 en 1 Redondo temperatura y humedad Negro  2x CJMCUTRRS 3.5mm Audio MP3 Stereo Headset Video Microfono Interfaz modulo
2x CJMCUTRRS 3.5mm Audio MP3 Stereo Headset Video Microfono Interfaz modulo  Conector Balun BNC Hembra UTP Video CCTV Clip Sin soldadura
Conector Balun BNC Hembra UTP Video CCTV Clip Sin soldadura  POTENCIOMETRO LINEAL DOBLE B1M OHM 0,5W 15MM 6 PIN + PERILLA AMARILLA
POTENCIOMETRO LINEAL DOBLE B1M OHM 0,5W 15MM 6 PIN + PERILLA AMARILLA 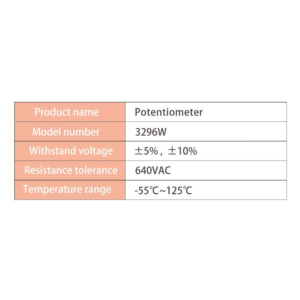 1x Potenciometro Multivuelta 10K ohm 3296-W 0,5w resistencia variable PCB
1x Potenciometro Multivuelta 10K ohm 3296-W 0,5w resistencia variable PCB  2x JOYSTICK XBOX ONE STICK BLANCO MANDO BOTONES L3 R3 PALANCAS
2x JOYSTICK XBOX ONE STICK BLANCO MANDO BOTONES L3 R3 PALANCAS  Contador mecánico de creditos arcade monedero
Contador mecánico de creditos arcade monedero  FUNDA TERMORETRACTIL TUBO 3 METROS 12-16-20 mm
FUNDA TERMORETRACTIL TUBO 3 METROS 12-16-20 mm  Cargador de movil coche mechero Carga rapida doble USB 3.1A qualcomm 3.0 Blanco
Cargador de movil coche mechero Carga rapida doble USB 3.1A qualcomm 3.0 Blanco  5x Potenciometro vertical tipo RV09 5K ohm lineal 0,05w resistencia ajustable
5x Potenciometro vertical tipo RV09 5K ohm lineal 0,05w resistencia ajustable  Voltimetro Amperimetro 100V 50A Digital DC Rojo Azul
Voltimetro Amperimetro 100V 50A Digital DC Rojo Azul 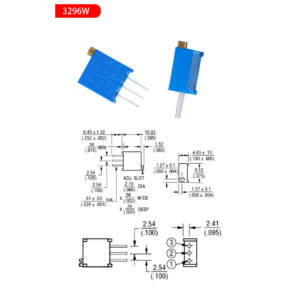 1x Potenciometro Multivuelta 5K ohm 3296-W 0,5w resistencia variable PCB
1x Potenciometro Multivuelta 5K ohm 3296-W 0,5w resistencia variable PCB 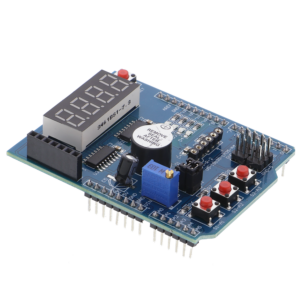 Shield Multifunción para Arduino UNO, MEGA y Leonardo - Módulo de Expansión
Shield Multifunción para Arduino UNO, MEGA y Leonardo - Módulo de Expansión  5X POTENCIOMETRO MULTIVUELTA 500 OHM 3296-W 0,5W RESISTENCIA VARIABLE PCB
5X POTENCIOMETRO MULTIVUELTA 500 OHM 3296-W 0,5W RESISTENCIA VARIABLE PCB  Cable flexible tecla boton SR interruptor Nintendo Switch JoyCon SYNC Flex Derecha
Cable flexible tecla boton SR interruptor Nintendo Switch JoyCon SYNC Flex Derecha  5x Varistor 10D471K 470V 2.5KA DISC 10MM MOV10D471K
5x Varistor 10D471K 470V 2.5KA DISC 10MM MOV10D471K  Modulo Micro SD TF Arduino ARM AVR
Modulo Micro SD TF Arduino ARM AVR  12x Potenciometro 2K ohm 1/4w 0,25w horizontal resistencia variable
12x Potenciometro 2K ohm 1/4w 0,25w horizontal resistencia variable  2x JOYSTICK PS4 PLAYSTATION 4 ANALOGICO MANDO THUMB STICK BOTONES R3 L3 AZUL
2x JOYSTICK PS4 PLAYSTATION 4 ANALOGICO MANDO THUMB STICK BOTONES R3 L3 AZUL 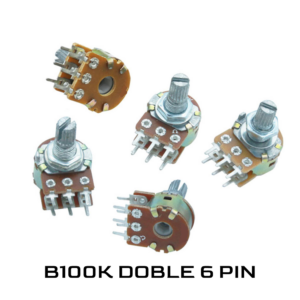 POTENCIOMETRO LINEAL DOBLE B100K OHM 0,5W 15MM 6 PIN + PERILLA AZUL
POTENCIOMETRO LINEAL DOBLE B100K OHM 0,5W 15MM 6 PIN + PERILLA AZUL  5X FUSIBLE RAPIDO DE VIDRIO 5X20 MM 10A 250V REF2137
5X FUSIBLE RAPIDO DE VIDRIO 5X20 MM 10A 250V REF2137  10x L293D DRIVER DIP-16 MOTORES PASO A PASO CONTINUA QUADRUPLE HALF-H DRIVER
10x L293D DRIVER DIP-16 MOTORES PASO A PASO CONTINUA QUADRUPLE HALF-H DRIVER  Cable de silicona liquida de carga super rapida de 120 W 6A MicroUSB giratorio
Cable de silicona liquida de carga super rapida de 120 W 6A MicroUSB giratorio  10x CONDENSADOR ELECTROLITICO 10uF 25v 105º C - ELECTROLYTIC CAPACITOR
10x CONDENSADOR ELECTROLITICO 10uF 25v 105º C - ELECTROLYTIC CAPACITOR  Modulo TTP223B sensor capacitivo tactil interruptor arduino
Modulo TTP223B sensor capacitivo tactil interruptor arduino  Conector DC Jack Hembra 5.5 x 2.1 alimentacion circuito integrado Arduino
Conector DC Jack Hembra 5.5 x 2.1 alimentacion circuito integrado Arduino  Modulo led RGB 5mm tricolor Arduino electronica catodo comun KY-016
Modulo led RGB 5mm tricolor Arduino electronica catodo comun KY-016  1x Potenciometro Multivuelta 1K ohm 3296-W 0,5w resistencia variable PCB
1x Potenciometro Multivuelta 1K ohm 3296-W 0,5w resistencia variable PCB  PORTAPILAS 2 PILAS AA LR06 CON INTERRUPTOR Y TAPA TRANSPARENTE
PORTAPILAS 2 PILAS AA LR06 CON INTERRUPTOR Y TAPA TRANSPARENTE  CONDENSADOR DE ARRANQUE CBB61 7UF 450V ac
CONDENSADOR DE ARRANQUE CBB61 7UF 450V ac  Carcasa transparente acrilica raspberry pi 4 + LCD 3.5" Tactil
Carcasa transparente acrilica raspberry pi 4 + LCD 3.5" Tactil