
Hola amigos técnologos, en nuestra entrada de hoy, montaremos un curioso proyecto en el que con la ayuda de dos servos y un Arduino, moveremos la »muñeca» y los »dedos» de una pinza robótica. La práctica consistirá en programar los servos que dan el movimiento a la pinza de modo que obedezcan el movimiento de dos potenciómetros.
Materiales necesarios
 | Pinza robótica |
 | Servos |
 | Arduino UNO R3 |
 | Protoboard |
 | Potenciómetros |
 | Cables |
Conozcamos mejor la pinza robótica y los servos
Pinza robótica:
La pinza robótica es un mecanismo formado por dos piezas moviles las cuales pueden cerrarse y abrirse ejerciendo cierta presión, para así poder sujetar objetos.
Esta compuesta por piezas de aluminio y estas a su vez ensambladas con tornillos de métrica 3.
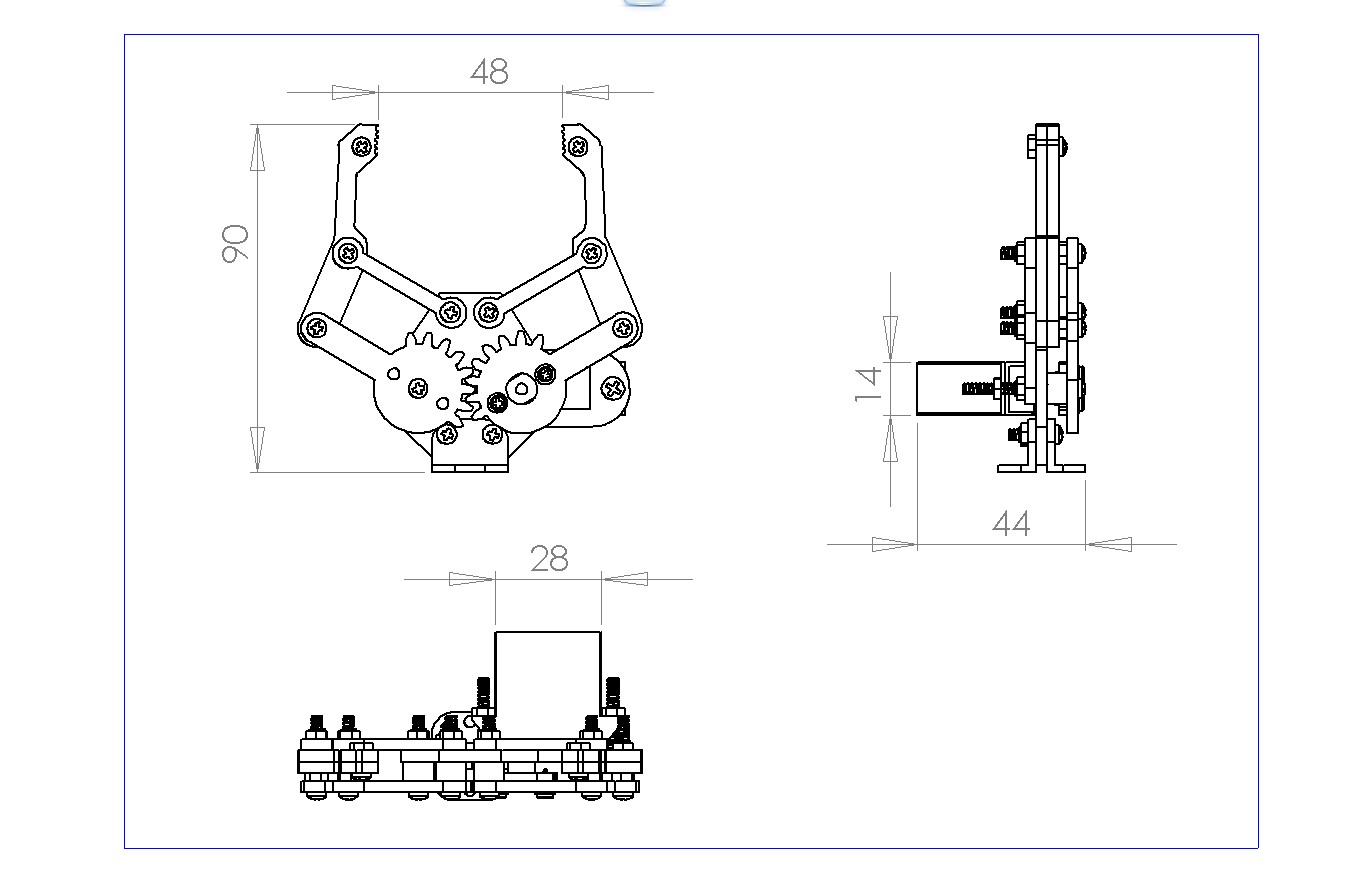
Dimensiones de la pinza robótica:
Servos:
Un servomotor es un actuador electrónico, compuesto básicamente por un motor de corriente continua, unos engranajes reductores y una electrónica de control.
Gracias a esta electrónica podemos hacer que el motor tome una posición concreta y ademas se oponga al cambio mecanico de esa posición.
Para ampliar información sobre los servomotores, puede descargarte la siguiente hoja de datos:
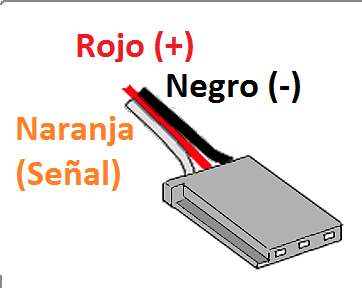
Conexion del servo
Práctica con pinza robótica:
En la práctica de hoy moveremos la muñeca y los dedos de una pinza robótica girando dos potenciometros.
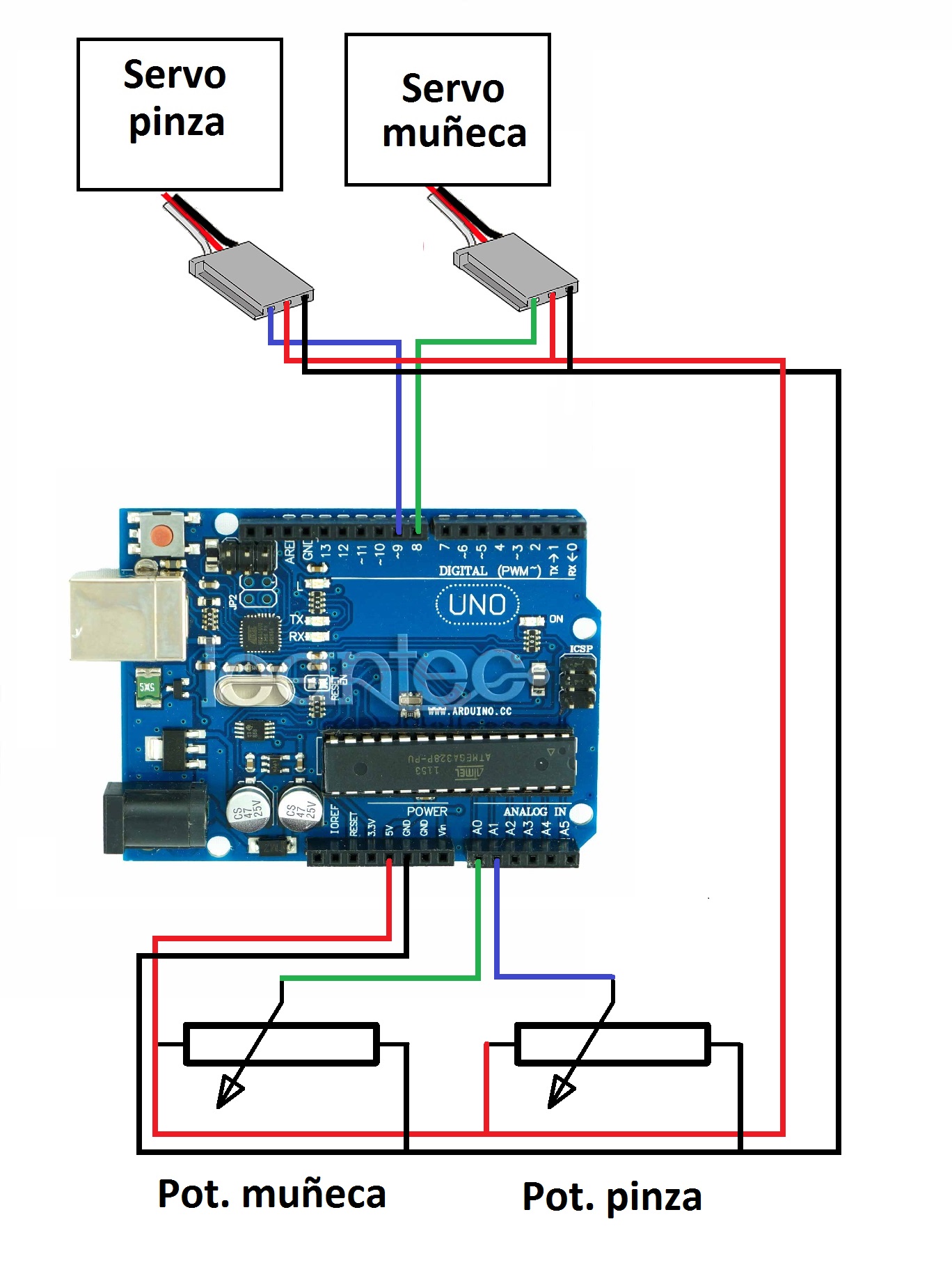
Esquema de montaje
Código de control
#include <Servo.h> Servo servomuneca; //Creamos el servo de la muñeca Servo servopinza; // Creamos el servo de la pinza int angulomuneca = 0;//Creamos la variable angulomuneca int angulopinza = 0;//Creamos la variable angulopinza int valorPotenciometro1 = 0;//Creamos la variable valorPotenciometro1 int valorPotenciometro2 = 0;//Creamos la variable valorPotenciometro2 void setup() { Serial.begin(9600);//Inicializamos el puerto serie servomuneca.attach(8);//Definimos el pin de servomuneca servomuneca.write(90);//Ponemos el servo a 90 grados servopinza.attach(9);//Definimos el pin de servopinza servopinza.write(90);//Ponemos el servo a 90 grados delay(2000);//Esperamos 2 segundos } void loop() { //Lee el valor del potenciometro valorPotenciometro1 = analogRead (0);//Leemos el valor del poten. 1 valorPotenciometro2 = analogRead (1);//Leemos el valor del poten. 2 /*Mapeamos el valor de los potenciometros para que el valor leido siempre este entre 10 y 180 grados y lo guardamos en la variables declaradas para almacenar los ángulos*/ angulomuneca = map (valorPotenciometro1, 0, 1023, 10, 180); angulopinza = map (valorPotenciometro2, 0, 1023, 10, 180); servomuneca.write(angulomuneca);//Damos al servo el ángulo resultante servopinza.write(angulopinza);//Damos al servo el ángulo resultante }