

Prácticas:
Ahora vamos a lo importante, os traemos una serie de prácticas para la ESO desarrolladas por Jose Pujol.
Materiales necesarios para las prácticas:
 |
– Arduino UNO |
 |
– Basic Shield Kiwibot |
 |
– Módulo bluetooth HC-06 |
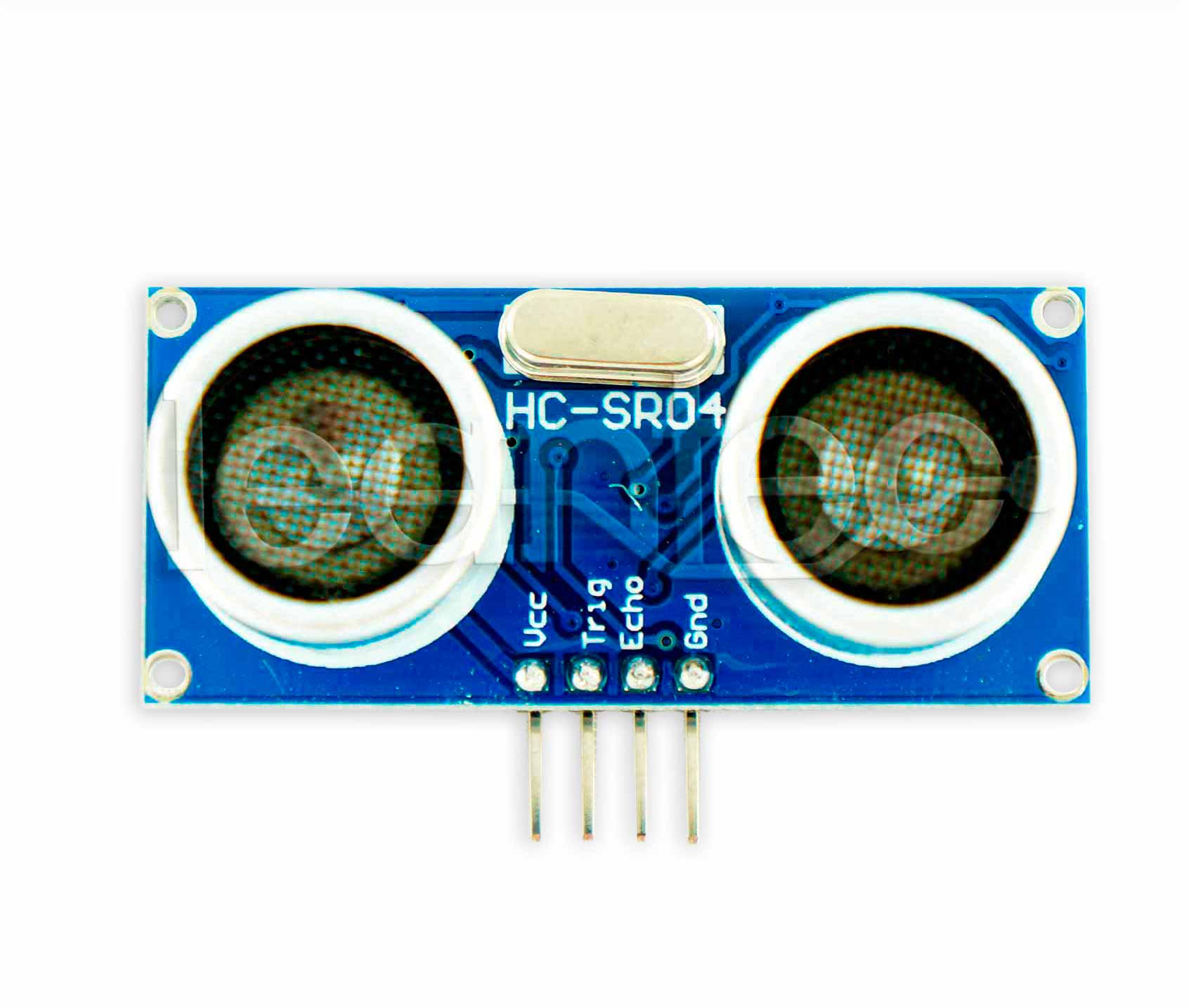 |
– Sensor ultrasonidos HC-SR04 |
 |
– Servos de rotación continua |
 |
– Printbot |
Práctica 1: Introducción a Arduino:
Duración: 1 Sesión
Objetivos
-Conocer que es Arduino y sus posibilidades.
-Conocer la importancia del Open Source Hardware. OSH
-Poner el sistema en marcha
Para hacer:
-Cargar el ejemplo Blink.
-Modificar los tiempos de parpadeo.
-Hacer que el led se quede definitivamente apagado después de 10 segundos.
Práctica 2: Semáforo con led RGB
Duración 1 Sesión.
Objetivos:
-Conectar el escudo Arduino Basic Shield
-Controlar salidas digitales.
-Desarrolar nuestro primer programa escrito.
-Aprender sobre el led RGB
-Aprender bucle for.
Para hacer:
-Completar el programa facilitado en las diapositivas.
-Añador el parpadeo a la luz azul, en el semáforo la amarilla.
-Añadir tiembre, que puede sonar con la luz amarilla intermitente.
-Reducir el teimpo de parpadeo en cada bucle
Práctica 3: Pulsador-salida
Duración: 1 sesión
Objetivos:
-Leer entradas digitales
-Activar salidas digitales
-Aprender estructuras if-else
-Usar operadores booleanos
-Aprender a usar memoria de estado
-Solucionar el problema del rebote
Para hacer:
-Hacer el sistema pulsador timbre
-Hacer sistema pulsador led con memoria
-Unir ambos programas
Practica 4: Sensor de luz
Duración: 1 Sesión
Objetivos:
-Aprender a leer entradas analógicas
-Imprimir por el puerto serie
Para hacer:
-Imprimir los valores de la LDR por el puerto serie
-Realizar un interruptor crepuscular
-Añadir una escala de colores con el led RGB
Práctica 5: Control de luminosidad con led RGB
Duración 1 Sesión
Objetivos:
-Controlar salidas analógicas
-Relacionar entradas y salidas analógicas
-Manejar mapeo de valores
-Usar un joystick
-Usar un acelerometro
Para hacer:
-Probar el programa analog-> fading
-Incorporar al programa otro led más y mezclarlo
-Incorporar el joystick, acelerometro, la ldr…
Práctica 6: Sensor de distancia por Ultrasonidos
Duración: 1 sesión
Objetivos:
-Manejar el sensor de distancia por ultrasonidos HC-SR04
Para hacer:
-Probar el sensor imprimiento la distancia por el puerto serie y comprobar que sea correcta.
-Hacer un sistema anti-golpe de apacamiento de coche
-Hacer un sistema de alarma
Práctica 7: Control Led desde PC.
Duración: 1 sesión
Objetivos:
-Controlar un led mediante el teclado via puerto serie
-Comprender el funcionamiento de la comunicación entre dispositivos
Para hacer:
-Probar el programa Communication->PhisicalPixel para encender y apagar un led
-Hacer el programa para controlar el led al recibir: r125>/g150>/b255>
Práctica 8: Control de servo de posición
Duración: 1 sesión
Objetivos
-Controlar un servomotor de posición
-Usar una librería
Para hacer:
-Probar el programa servo-> knob
-Controlar servo en posiciones determinadas
-Hacer un indicador de estado
-Mover el servo grado por grado.
Práctica 9: Aplicaciones de la matríz de led
Duración 1 sesión
Objetivos:
-Instalar y usar una libraría
-Controlar una matríz de led y comprender su funcionamiento
-Usar el control de tiempo con reloj interno
Para hacer:
-Descargar la libraría e instalarla
-Controlar la matríz con la libraría
-Mover un pixel por la pantalla con el acelerometro
-Representar emoticonos
-Representar temperatura
Práctica 10: Control de vehículo con servos
Duración: 1 sesión
Objetivo:
-Control de vehículo de forma automática.
-Control de servomotores continuos.
Para hacer:
-Controlar vehículo de forma automática.