Novedades



Más comprados
-
 T7000 HNBC Pegamento Adhesivo T-7000 15ml NEGRO transparente Pantalla LCD Móvil
3,14€
T7000 HNBC Pegamento Adhesivo T-7000 15ml NEGRO transparente Pantalla LCD Móvil
3,14€
-
 T7000 HNBC Pegamento Adhesivo T-7000 50ml NEGRO transparente Pantalla LCD Móvil
5,14€
T7000 HNBC Pegamento Adhesivo T-7000 50ml NEGRO transparente Pantalla LCD Móvil
5,14€
-
 PANTALLA DE CRISTAL PARA GAME BOY
54,40€
PANTALLA DE CRISTAL PARA GAME BOY
54,40€
-
 3x caja plastico almacenaje joyas electrónica herramientas collar 16.5x12x6
16,00€
3x caja plastico almacenaje joyas electrónica herramientas collar 16.5x12x6
16,00€
-
 3x caja plastico almacenaje joyas electrónica herramientas collar 14.2x8.2x3.4
10,50€
3x caja plastico almacenaje joyas electrónica herramientas collar 14.2x8.2x3.4
10,50€
Lo que nos diferencia del resto

Atención Personalizada
Estamos aquí para ayudarle, si necesita información sobre un producto, tiene alguna duda o requiere asistencia con su pedido, no dude en contactar con nosotros.

Presupuestos a medida
Pida presupuesto sin ningún tipo de compromiso, tenemos descuentos para docentes y precios especiales por volumen.

¿Necesita distribuidor?
Queremos ser su proveedor de electrónica ¿Necesita productos que no tenemos en el catálogo? Los buscaremos y le daremos presupuesto y plazo de entrega.

Hoy, en nuestra entrada vamos a hablar de unos simpáticos robots camareros que hemos encontrado en un restaurante en Harbin, una localidad al norte de China. Además explicaremos como ensamblar tu propio robot usando una tecnología similar a la que usan estos robots camareros.
En el restaurante en cuestión, hay unos 20 robots, estos son los encargados de hacer todas las acciones habituales de un restaurante.
Para hacer a estos más humanos, los han programado para que sean capaces de reproducir más de diez tipos distintos de expresiones faciales y distintas frases para recibir y despedir a los clientes.
El responsable del restaurante Liu Hasheng, pronostica, que estos robots estarán en apenas una década en la mayoría de los restaurantes y hogares: «En cada casa habrá uno para cocer los alimentos, ayudar a los mayores, hacer la limpieza o como seguridad personal» El señor Liu cree que el hecho de introducir los robots en la la vida cotidiana de las personas, es un paso importante para que los robots estén cada vez más integrados entre las personas.
¿Como funcionan?
Estos robots están provistos de unos sensores en su parte inferior los cuales detectan una linea negra en el suelo, ellos solo tienen que seguir esta linea para llegar hasta los clientes.
Estos sensores son capaces de detectar la diferencia luz que rebota en el color negro de la linea y en el blanco del resto del suelo.
Construyamos nuestro propio robot.
En este apartado explicamos como construir tu propio robot con la capacidad de seguir una linea, al igual que hacen estos robot camareros.
Componentes utilizados.
-Arduino UNO Rev3. Esta será la placa encargada de recibir la información procedente del sensor y procesarla para así seguir la linea.
-Chasis robot 2WD. Sobre este chasis, montaremos toda la electrónica necesaria para manejar nuestro robot.
-Sensor LRE-F22. Este sensor es el encargado de detectar la linea en el suelo.
-Controlador de motores L298D. Este es el encargado de aportar potencia a las señales de procedentes de nuestro Arduino Uno para controlar los motores.
-Cables protoboard. Estos cables los usamos para conectar todos los componentes que componen nuestro robot.
Proceso operativo
-El primer paso para desarrollar nuestro proyecto es hacer un esquema que nos indique el modo de conexión de todos los componentes de nuestro robot. (Ver esquema)
-A continuación cableamos toda la electrónica tal y como nos indica el esquema de conexión.
-Escribimos y compilamos el código, que manejara el robot. (Ver código)
-El último paso es probar el robot y depurar el programa hasta conseguir que funcione como deseamos.
Esquema de conexión.
-En el siguiente esquema se representan las conexiones.

Código.
-Descargar y añadir librería LEANTEC_ControlMotor
Imágenes.
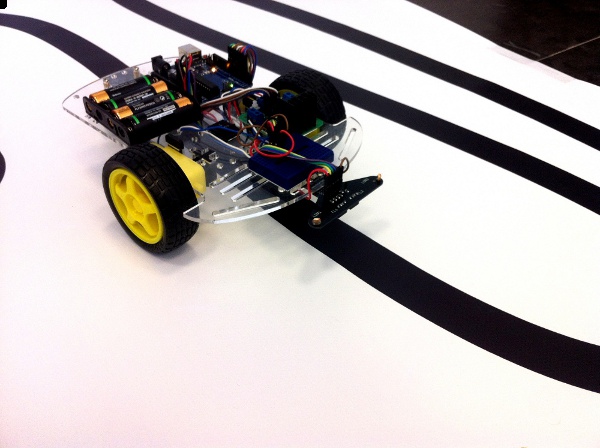
-En la siguiente imagen vemos el robot siguiendo la linea.
Video
Conclusiones
Con este proyecto hemos construidos nosotros mismo un robot capaz de seguir una linea, además de entender como funciona una tecnología que se esta usando en la actualidad en la vida profesional y cotidiana.
Enlaces de interes
– Comprar Seguidor de Línea 2WD
– Comprar Seguidor de Línea 4WD



Buenas a todos, los archivos los pueden descargar desde esta URL http://www.leantec.es/content/10-descargas
http://www.leantec.es/index.php?controller=attachment&id_attachment=39
http://www.leantec.es/index.php?controller=attachment&id_attachment=36
Buenas Tardes en tu seguidor tal vez implementaste algún control como puede ser un PD para el control de los motores que ria revisar tu código pero no se me descomprime podrías subirlo nuevamente Gracias!!
Buenas días, al descargar el código me da un error al descomprimir, puedes volver a subirlo?
Buenas tardes,
Soy profesor de un instituto y me gustaria saber que ajustes o calibración tengo que hacer para lograr que funcione correctamente ya que no logro que siga la linea negra.Test de motores bien però la parte final del còdigo del seguidor de linea tengo problemas.
Gracias por vuestra col.laboración.
Hola, muchas gracias por compartir esta información. Tengo tres cuestiones que no me quedan claras:
– La entrada VCC del sensor LRE-F22, ¿la puedo conectar al arduino a la patilla 5V?
– La conexión de la pila al arduino, ¿está mal?, debería ir el cable rojo al Vin y el negro a GRD, ¿no?
– No veo claro el esquema de conexión del controlador de motores L298D
gracias nuevamente