
Hoy en nuestro blog, explicamos como construir tu propio robot con Arduino y controlarlo por radiofrecuencia. Es un proyecto interesante, por que manejaremos radiofrecuencia, ademas de aprender a leer la información de un joystick y procesarla.
Componentes utilizados.
-2 placas Arduino UNO Rev3. Esta será la placa encargada de recibir la información procedente del modulo de RF y procesarla para hacer las gestiones necesarias. Además la segunda placa será responsable de leer lo que sucede en el joystick y enviar esa información atravez del modulo RF.(Más información aquí)
-Chasis robot 4WD. Sobre este chasis, montaremos toda la electrónica necesaria para manejar nuestro robot. (Más información aquí)
-2 Módulos RF NRF24L01. Con estos módulos comunicaremos el Arduino que tenemos en el mando con el Arduino del robot.(Más información aquí)
-Controlador de motores L298N. Este es el encargado de aportar potencia a las señales de procedentes de nuestro Arduino Uno para controlar los motores.(Más información aquí)
-Cables protoboard. Estos cables los usamos para conectar todos los componentes que componen nuestro robot.(Más información aquí)
Proceso operativo
-El primer paso para desarrollar nuestro proyecto es hacer un esquema que nos indique el modo de conexión de todos los componentes de nuestro robot. (Ver esquema)
-A continuación cableamos toda la electrónica tal y como nos indica el esquema de conexión.
-Escribimos y compilamos el código, que manejara el robot. (Ver código)
-El último paso es probar el robot y depurar el programa hasta conseguir que funcione como deseamos.
Esquema de conexión.
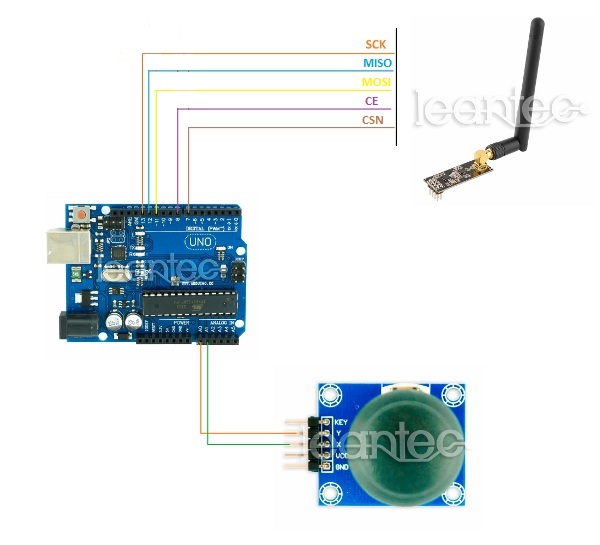
-En el siguiente esquema se representan las conexiones del control TX.
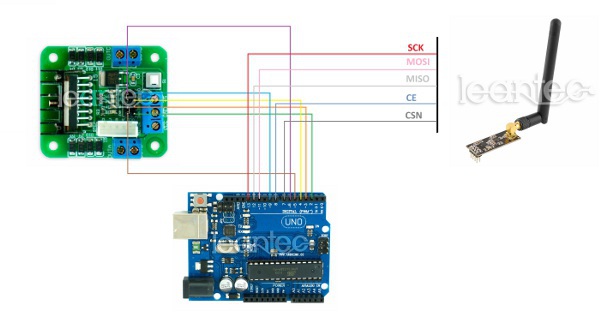
-En el siguiente esquema se representan las conexiones del robot RX.
Código.
Este primer código es el ecargado de manejar el mando de control de robot.
/** * A Mirf example to test the latency between two Ardunio. * * Pins: * Hardware SPI: * MISO -> 12 * MOSI -> 11 * SCK -> 13 * * Configurable: * CE -> 10 * CSN -> 9 * * Note: To see best case latency comment out all Serial.println * statements not displaying the result and load * 'ping_server_interupt' on the server. */ #include <SPI.h> #include <Mirf.h> #include <nRF24L01.h> #include <MirfHardwareSpiDriver.h> void setup(){ Serial.begin(9600); Mirf.cePin = 10; // Cambiamos el pin CE del standar ya que usamos un shield para el joystick que no concuerda los pines con la librería Mirf.csnPin = 9; // Cambiamos el pin CSN del standar ya que usamos un shield para el joystick que no concuerda los pines con la librería Mirf.spi = &MirfHardwareSpi; // Configuramos el SPI de Arduino por Hardware Mirf.init(); // Inciamos el módulo de RF Mirf.setRADDR((byte *)"clie1"); // Indicamos la dirección para recibir datos Mirf.payload = 4; // Indicamos el número de datos que se espera recibir Mirf.config(); // Configuramos el módulo de RF } void loop(){ uint8_t datos[Mirf.payload]; // Creamos un array con el tamaño de los datos que recibe el modulo RF int valor[2]; // Variables que son modificadas según valor del joystick double calculos[3]; // Estas variables la usamos para calcular la velocidad que debe mandar, según posición del mando int vector; // Variable que calcula un vectos y nos dice la distancia a la que está el joystick del centro valor[0]=(analogRead(0)/2.01)-253; // Leemos el ADC y calculamos para que de aproximadamente uno +-255 de máximo valor[1]=(analogRead(1)/2.01)-246; // Leemos el ADC y calculamos para que de aproximadamente uno +-255 de máximo if(valor[0] >255){valor[0]=255;} if(valor[0] < -255){valor[0]=-255;} // Nos aseguramos que no sobrepase los +255 y os -255 if(valor[1] >255){valor[1]=255;} if(valor[1] < -255){valor[1]=-255;} // Nos aseguramos que no sobrepase los +255 y os -255 calculos[0]=valor[0]; // Copiamos los valores las variables calculo para su posterior procesamiento calculos[1]=valor[1]; // Copiamos los valores las variables calculo para su posterior procesamiento calculos[3]=sqrt((calculos[0]*calculos[0])+(calculos[1]*calculos[1])); // Calculamos la distancia a la que está el joystick del centro if(valor[0] < 0){calculos[3] *= -1;} // Si es menor que 0, lo ponemos en negativo ya que el cálculo anterior no lo hace if(calculos[3] > 255){calculos[3]=255;} // Nos aseguramos que no sea mayor que 255 if(calculos[3] < -255){calculos[3]=-255;} // Nos aseguramos que no sea menor que -255 vector=calculos[3]; // Pasamos el valor calculado que lleva decimales a una variable de 16 bit y eliminamos los decimales para enviarla posteriormente valor[1]=(analogRead(1)/5.11)-100; // Volvemos a leer el joystick (Eje X) para que nos de un valor de +-100 que es lo que usa la librería del robot en el giro if(valor[1] > 99){valor[1]=99;} // Nos aseguramos que no sea mayor que 99 ya que 100 el robot lo entiende como giro sobre su propio eje if(valor[1] < -99){valor[1]=-99;} // Nos aseguramos que no sea menor que -99 ya que -100 el robot lo entiende como giro sobre su propio eje datos[2]=vector>>8; // Dividimos el vector que son 16bit en dos variables de 8 bit (2 byte) datos[3]=vector; // Dividimos el vector que son 16bit en dos variables de 8 bit (2 byte) datos[0]=valor[1]>>8; // Dividimos la variable valor que son 16bit en dos variables de 8 bit (2 byte) datos[1]=valor[1]; // Dividimos la variable valor que son 16bit en dos variables de 8 bit (2 byte) Mirf.setTADDR((byte *)"serv1"); // Configuramos la dirección a donde vamos a enviar los datos Mirf.send(datos); // Enviamos los datos while(Mirf.isSending()){} // Esperamos que termine la emisión Serial.print("Vector: "); // Enviamos los datos por terminal para depurar el control Serial.print(" "); // Enviamos los datos por terminal para depurar el control Serial.print(vector); // Enviamos los datos por terminal para depurar el control Serial.print(" "); // Enviamos los datos por terminal para depurar el control Serial.print("Valor 0 "); // Enviamos los datos por terminal para depurar el control Serial.print(valor[0]); // Enviamos los datos por terminal para depurar el control Serial.print(" "); // Enviamos los datos por terminal para depurar el control Serial.print("Valor 1 "); // Enviamos los datos por terminal para depurar el control Serial.println(valor[1]); // Enviamos los datos por terminal para depurar el control
Este siguiente código es el encargado de recibir la información del mando de control y gestionarla para hacer que el robot se mueva.
// Incluimos la librería de los motores #include <LEANTEC_ControlMotor.h> // Configuramos los pines que vamos a usar ControlMotor control(2,3,4,9,5,6); // MotorDer1,MotorDer2,MotorIzq1,MotorIzq2,PWM_Derecho,PWM_Izquierdo int led = 10; int memoled= 0; /** * An Mirf example which copies back the data it recives. * * Pins: * Hardware SPI: * MISO -> 12 * MOSI -> 11 * SCK -> 13 * * Configurable: * CE -> 8 * CSN -> 7 * */ #include <SPI.h> #include <Mirf.h> #include <nRF24L01.h> #include <MirfHardwareSpiDriver.h> unsigned long time=0; // Variable para controlar el tiempo entre dato y dato int valor[2]; // Variable para almacenar la dirección y la velocidad //----------------------------- Configuramos Ardunio --------------------------------------- //------------------------------------------------------------------------------------------ void setup(void){ pinMode(led, OUTPUT); Serial.begin(9600); Mirf.spi = &MirfHardwareSpi; // Configuramos el SPI de Arduino por Hardware Mirf.init(); // Inciamos el módulo de RF Mirf.setRADDR((byte *)"serv1"); // Indicamos la dirección para recibir datos Mirf.payload = 4; // Indicamos el número de datos que se espera recibir Mirf.config(); // Configuramos el módulo de RF time=0; // Ponemos a 0 el tiempo } //--------------------------- Arrancamos el programa --------------------------------------- //------------------------------------------------------------------------------------------ void loop(void) { byte datos[Mirf.payload]; // Buffer para almacenar los datos if(!Mirf.isSending() && Mirf.dataReady()){ // Esperamos recibir un dato Mirf.getData(datos); // Copiamos al buffer los datos recibidos time = millis(); // Almacenamos el tiempo en la variable valor[0]=(datos[0]<<8)+datos[1]; // Como lo que recibimos son 4 byte (2 variables de 16bit) tenemos que unirla valor[1]=(datos[2]<<8)+datos[3]; // Como lo que recibimos son 4 byte (2 variables de 16bit) tenemos que unirla Serial.print("Robot "); // Línea para ver en el terminal que recibe el robot Serial.print(valor[0]); // Línea para ver en el terminal que recibe el robot Serial.print(" "); // Línea para ver en el terminal que recibe el robot Serial.println(valor[1]); // Línea para ver en el terminal que recibe el robot if(memoled<25) {digitalWrite(led, LOW);} if((memoled>25)&&(memoled<35)) {digitalWrite(led, HIGH);} if(memoled>35) {memoled=0;} memoled++; } if ( ( millis() - time ) > 1000 ) { // Comprobamos si desde la última vez que recibimos un dato hasta ahora ha pasado mas de 1 seg control.Motor(0,0); // Si ha pasado mas de 1 seg, paramos le robot ya que no hay recepción de datos Serial.println("Error de recepcion de datos"); // Línea para ver en el terminal que recibe el robot delay(500); // Paramos 0,5 seg el robot digitalWrite(led, HIGH); } else{ // Si todo está correcto y estamos recibiendo datos, seguimos control.Motor(valor[1], valor[0]); // Pasamos los datos al control de motores. } }
Imágenes del proyecto.
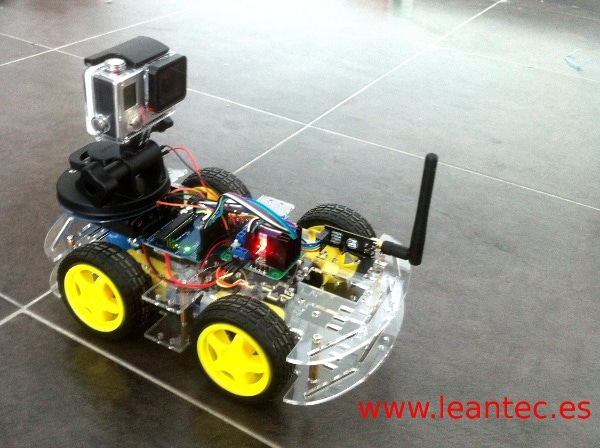
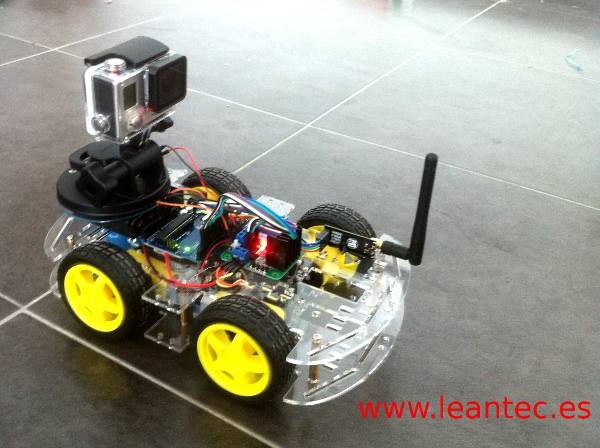
-En la siguiente imagen vemos el robot ya montado, con una cámara instalada en su parte superior.
Video del robot funcionando
tendrán algún vídeo o documento en donde pueda especificar paso por paso las conexiones y los posibles errores que se nos pueden presentar.
Tengo problemas para compilarlo
Además de subirlo a la placa
Alguien podría ayudarme?
Por favor
me podrian decir que baterias puedo usar para este proyecto
Hola!
Donde puedo encontrar la librería para controlar los modulos NRF24L01?
Muchisimas gracias de antemano!
hi sir, i have to control the robot car project. Where the rear wheels in the form of a dc motor is controlled with flex sensors and front wheels in the form of a servo motor controlled by the accelerometer sensor. Robot controller with a car connected with nrf24l01. if one of the sensors to control I can. but if it combines both to control I can not. Both sensors transmit data simultaneously . dc motors and servo motors confused receive data so that its movement is chaotic. How should I fix this? can you help me.? Can I send my program to you and you see.? Please.
you can send me share code pls ??
you can send me share code pls ??
Amigo, no me funcionó, ya cheque conexiones, todo y no me funciona, saludos.
Amigo, te fijaste que el esquema del control del robot no coincide con los pines que declara en el código Arduino? Yo cambié las conexiones de acuerdo al código y el Serial Monitor me muestra que funciona…
podrías compartirme el programa, por favor
me podrias compartir el programa con los arreglos , por favor
Buenas tardes, como puedo saber cuál es cada pin del modulo RF NRF24L01? En la placa del propio modulo no están marcadas. Gracias.
Buenos días Ramon.
En nuestra entrada de hoy, hacemos un sencillo proyecto con el módulo NRF24L01 y hay tenemos el pineado de dicho módulo.
Le dejo el enlace.
http://www.leantec.es/blog/44_Tutorial-Arduino–Modulo-NRF24L01.html
Un saludo.
Servicio técnico Leantec
Buen dia, me gustaria pudiera cotizarme todo los componentes utilizados en el carro. Y me gustaria se pusieran en contacto conmigo para la realizacion de un proyecto mechatronics@m-smartsolutions.com
Espero su pronta respuesta
Hola, muy buenas:
Realicé una compra en la web para realizar un montaje similar, me gustaría si fuera posible que me aconsejara sobre cuál es la mejor forma de alimentar el controlador L298N así como el Arduino.
Actualmente suministro 9V al driver (con el jumper colocado) y energizo el Arduino independientemente… el problema es que parece que los motores no tienen suficiente potencia para conseguir desplazar el robot (incluso fijando velocidad máxima).
¡Enhorabuena tanto por el blog como por la página!
Muchas gracias de antemano, un saludo.
Hola Juan José.
Las pilas de 9V para la alimentación de motores suelen ser insuficientes, no por la tensión que suministran, si no más bien por la capacidad que tienen, que apenas llegan a los 200mA.
Nuestro consejo es que uses 4 pilas AA si estás manejando el chasis de 2 ruedas o 6 pilas AA si estas con el chasis de 4 ruedas.
Una cosa a tener en cuenta si alimentas Arduino de forma independiente a el controlador de motores, es que GND del controlador y Arduino deben estar unidos.
Un saludo y si tiene alguna otra pregunta no dude en escribirnos.
Servicio técnico Leantec.
buenos días
Me pregunto si usted me puede dar una cotización incluyendo todo lo que hay en el video, incluyendo el joystick
gracias
Buenas Lecoquierre,
Hemos intentado contactar con usted pero nos ha sido imposible. Si aún sigue interesado puede escribirnos directamente a store@leantec.es y estaremos encantados de detallarle un presupuesto sobre sus necesidades.
Esperamos su respuesta.
Un saludo.
At. al Cliente leantec.es