

Hola amigos tecnólogos, en nuestra entrada de hoy tenemos un tutorial sobre como montar nuestros kit robot LRE-BTH2 y LRE-BTH4. Ambos kit basan su funcionamiento en la tecnología de comunicación por bluetooth.
Materiales necesarios.
–Kit robot LRE-BTH2 o Kit robot LRE-BTH4
-Teléfono movil con Android
Conozcamos mejor los Kit robot LRE-BTH2 y LRE-BTH4
Estos kit son básicamente vihículos robotizados controlables mediante bluetooth desde una aplicación móvil. La electrónica y la programación en ambos robot son exátamente iguales, siendo la diferencia más significativa entre uno y el otro el chasis sobre el que esta montado.
El LRE-BTH4 esta montado sobre el chasis de 4 ruedas 4WD y el LRE-BTH2 sobre el chasis de 2 ruedas 2WD.
¿Entonces por que elgir uno u otro?
A la hora de elegir uno con respecto a otro tenemos que pensar que ampliaciones queremos implementar al kit una vez tengamos terminado el control mediante bluetooth, siendo el LRE-BTH4 el más adecuado para ampliar las posibilidades del robot, ya que el chasis 4WD, que es el que este kit incorpora, tiene más superficie para la instalación de electrónica.
Incluido en los kit:
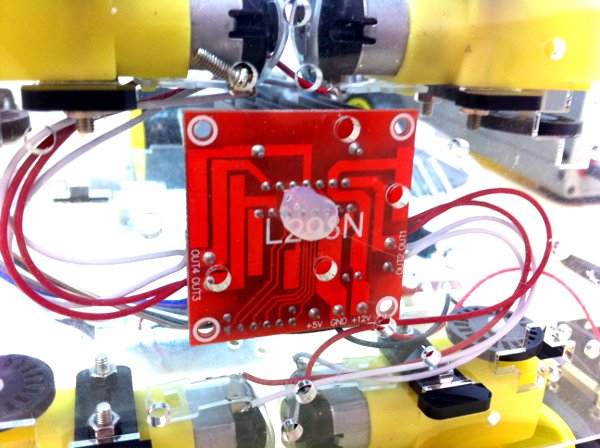
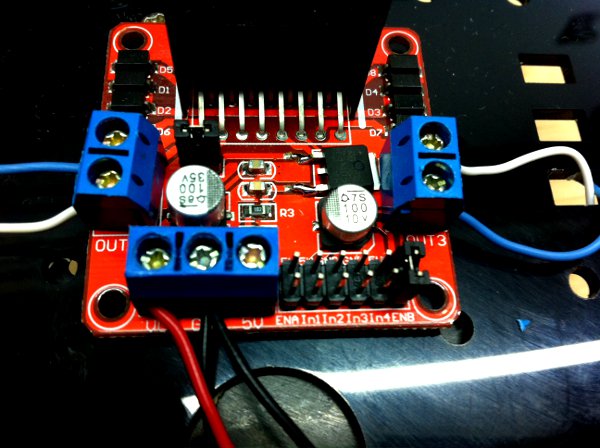
Controlador de motores L298N
Este controlador es uno de los más universales a la hora de manejar motores de corriente continua. Si necesitas más información sobre el mismo, visita el post.
Tambien tenemos una hoja de datos del L298N y una librería para simplificar su control.
Módulo bluetooth HC-06
Este módulo bluetooth es uno de los más usados para este tipo de aplicaciones, es sencillo de usar. Si quieres profundizar más en este modulo y en la tecnología bluetooth mira esta entrada de nuestro blog.
Mini protoboard de 170 contactos.
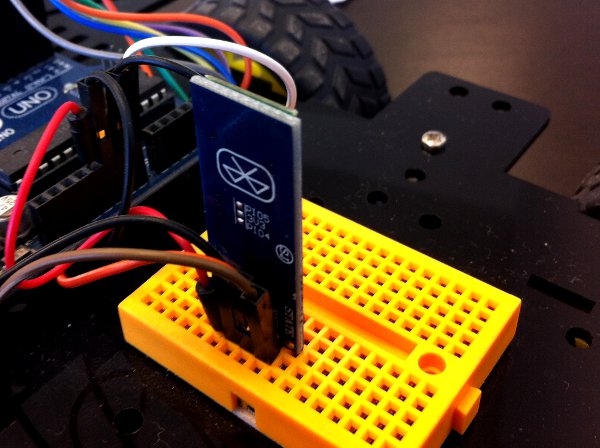
Esta protoboard la incluimos en el kit con la intención de facilitar la distribución de las tensiones de 5V y 3,3V ya que arduino solo tiene un pin para cada una. Tambien nos ayudamos de la protoboard para instalar facilmente el módulo bluetooth HC-06.
Cables de conexión
Son cables dupont de 20cm de longitud.
Chasis 2WD o 4WD.
Tengamos el chasis que tengamos el montaje del mismo es muy sencillo y con solo seguir 4 o 5 sencillos pasos tendremos nuestro chasis montado.
En los siguientes enlaces tenemos los manuales de montaje de los chasis.
Montaje de la electrónica y soldaduras necesarias:
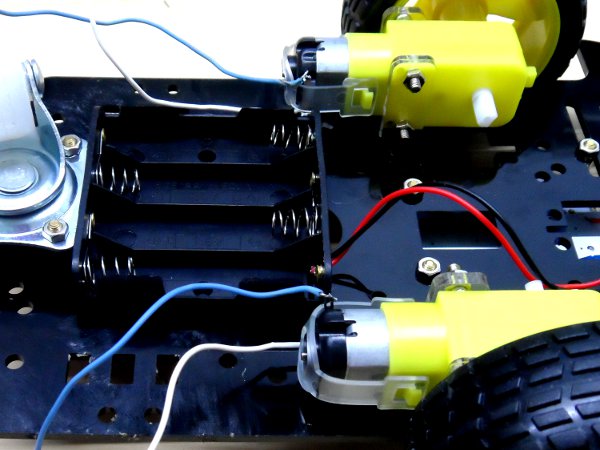
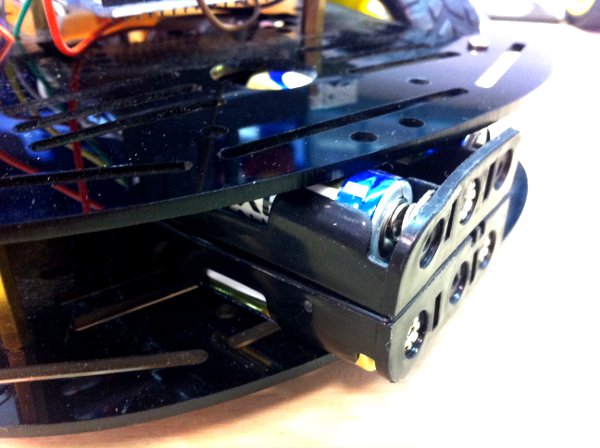
Antes de montar la electrónica vamos a hacer las únicas soldaduras que necesitamos. Soldaremos los cables de conexión de los motores a los motores. Es importante soldar los cables como muestra la imagen, en este caso los cables azules están en la parte superior cuando el motor está instalado en el chasis. Este detalle es importante para que ambos motores giren en el mismo sentido.
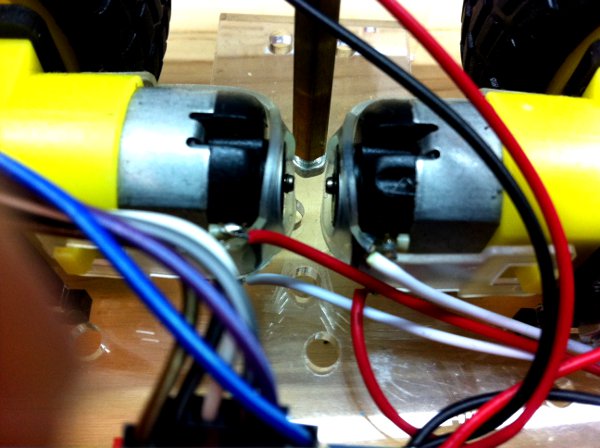
En el caso de las soldaduras para el robot de 4 ruedas, habrá que hacerlas como muestra la imagen de más abajo, hay que soldar los cables de los motores del mismo lado de forma que si en uno de los motores soldamos el cable »rojo arriba» en el motor que está enfrentado el cable »blanco» estará arriba. Los motores del otro lateral del robot se soldarán de la misma forma.
Con esto conseguimos que ambos motores giran en el mismo sentido.
El montaje de electrónica es muy sencillo. Aunque el chasis que tenemos tiene orificios para atornillar, nuestra recomendación es solo usarlos para algunas cosas.
Por ejemplo; en nuestro caso solo atorinillamos la placa controladora, es decir Arduino UNO, para el resto de componentes del kit usamos una pequeña gotita de silicona caliente.
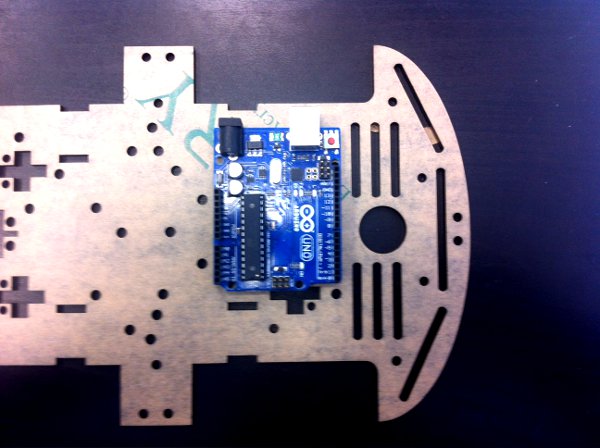
Instalación de la placa Arduino UNO.
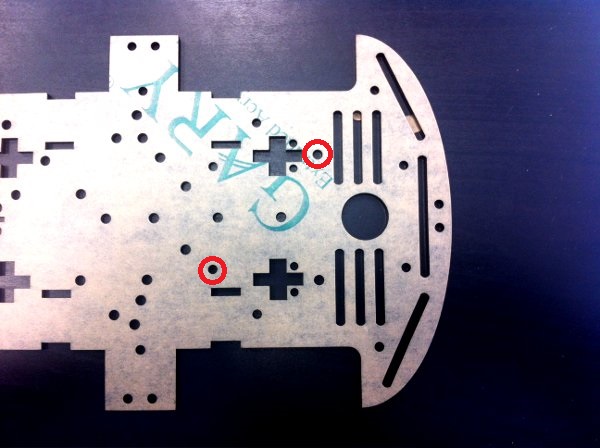
Para la instalación de Arduino en el chasis de nuestro kit LRE-BTH, usaremos algunos de los orficios que el chasis tiene.
Para el caso del chasis de 2 ruedas, Arduino se instala de la siguiente forma:
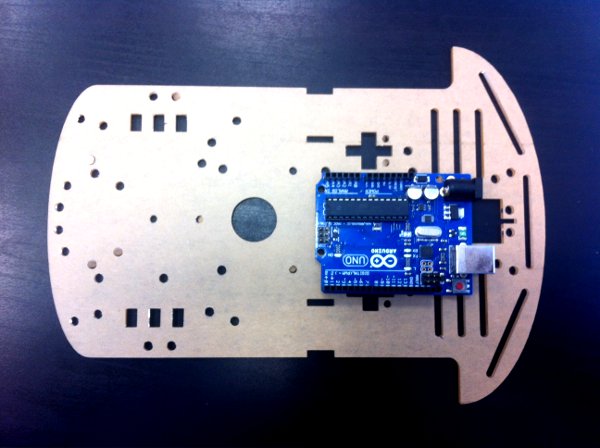
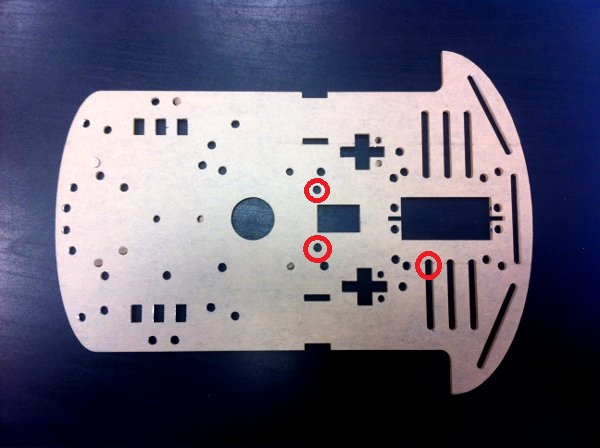
Para el caso del chasis de 2 ruedas, Arduino se instala de la siguiente forma:
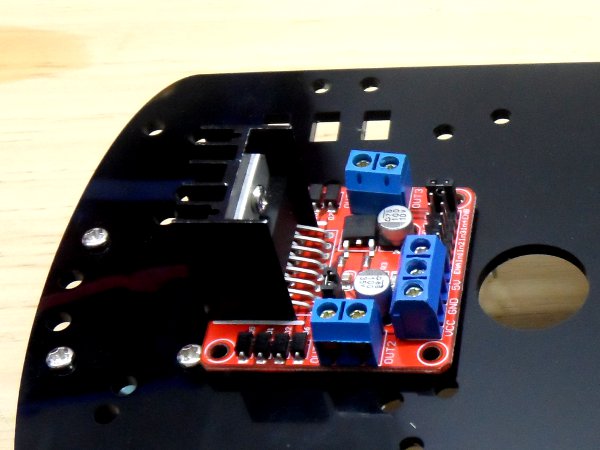
Así hacemos la instalación del driver:
Ponemos un gota de silicona en la parte inferior del driver.
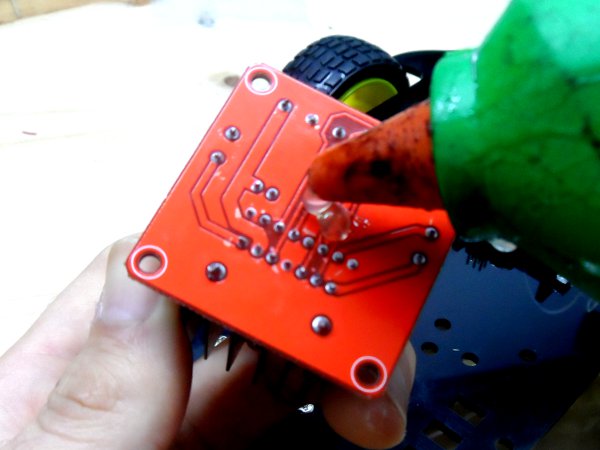
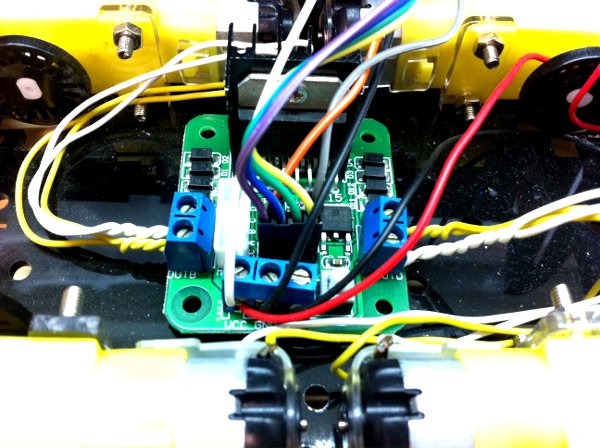
En la siguiente imagen vemos como queda el driver instalado con la silicona.
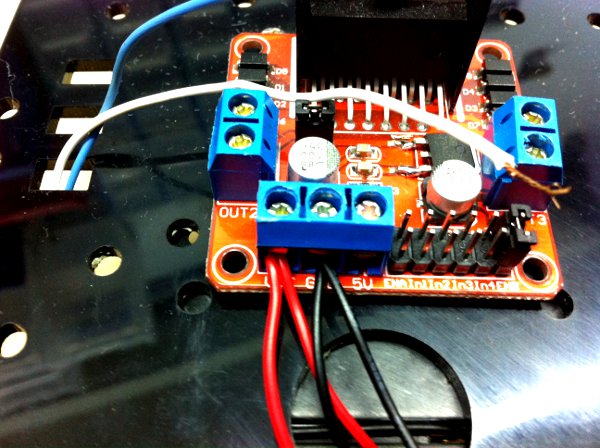
Así estará el driver en el chasis de 2 ruedas.
Y así en el driver de 4 ruedas.
Y de la siguiente forma instalamos los portapilas:
En esta ocasión solo es necesario fijar el portapilas con silicona en el robot LRE-BTH2.
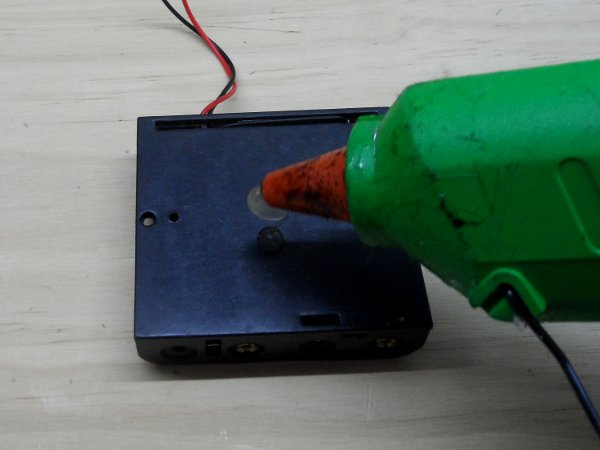
Lo pegamos en la parte de abajo del chasis, utilizando como tope la rueda loca.
Como podemos apreciar en la foto, el portapilas del robot LRE-BTH4 encaja entre las dos partes del chasis, por lo que no es necesario fijarlo.
Para la instalación de la protoboard usamos el pegamento que ella misma incorpora:

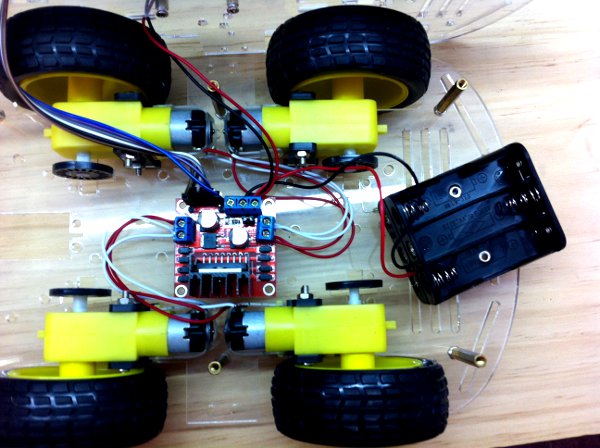
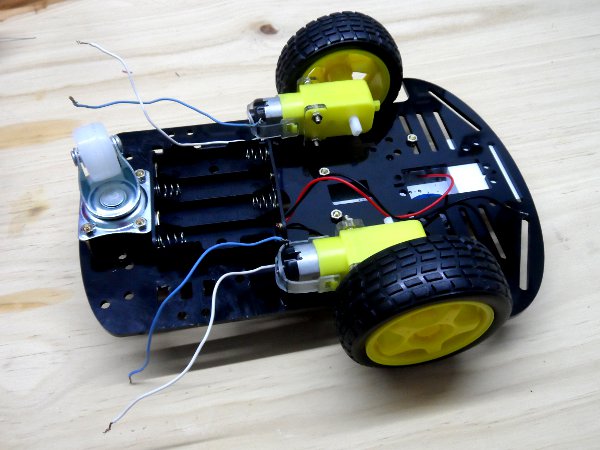
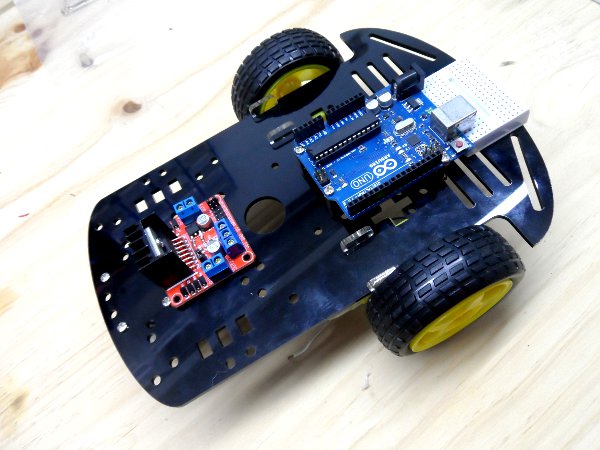
Y este es el aspecto que tendrían nuestros chasis con la electrónica instalada.
Fotos robot LRE-BTH2 con la electrónica instalada.
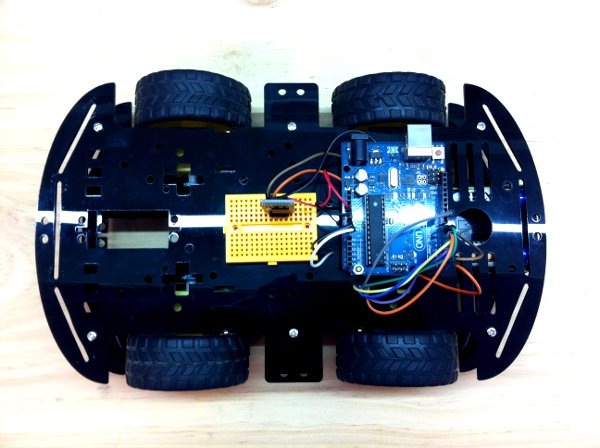
Fotos robot LRE-BTH4 con la electrónica instalada.
Esquemas de conexíon.
El esquema de conexión es casi igual para el robot BTH2 y para el robot BTH4. La única diferencia es que en el caso del BTH2 en cada salida del driver se conecta un motor, y en el BTH4 en cada salida del driver se conectan dos motores.
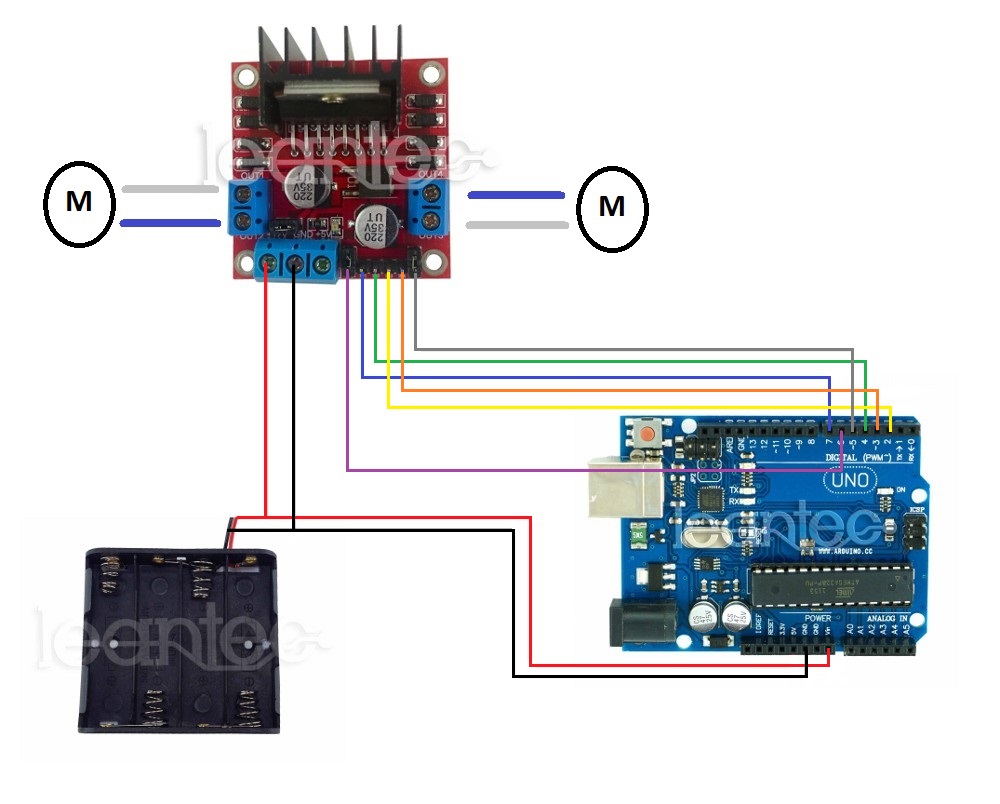
Detalles de la conexión de los motores y la alimentación
Conexión de los motores en el caso del robot LRE-BTH2 y BTH4
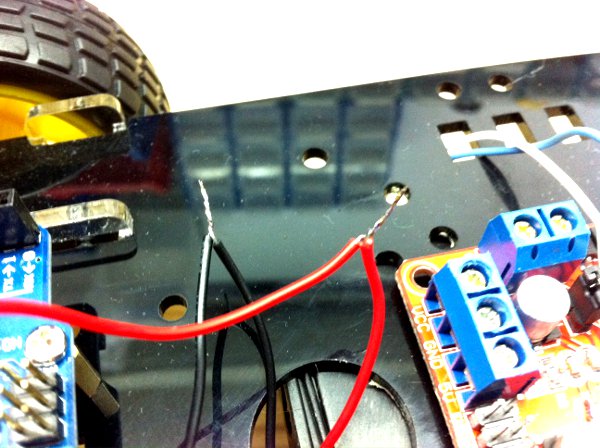
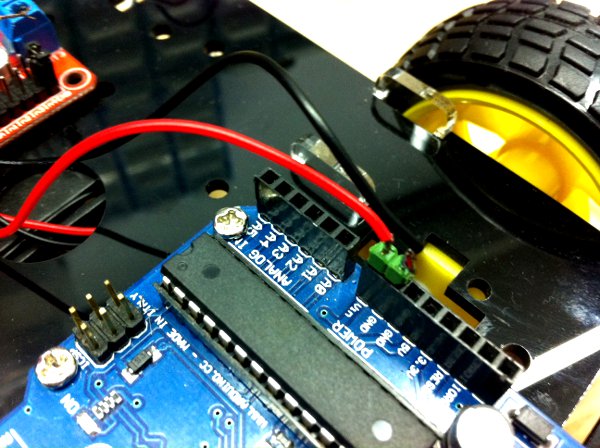
Para alimentar el driver y Arduino con un solo portapilas hacemos una »Y».
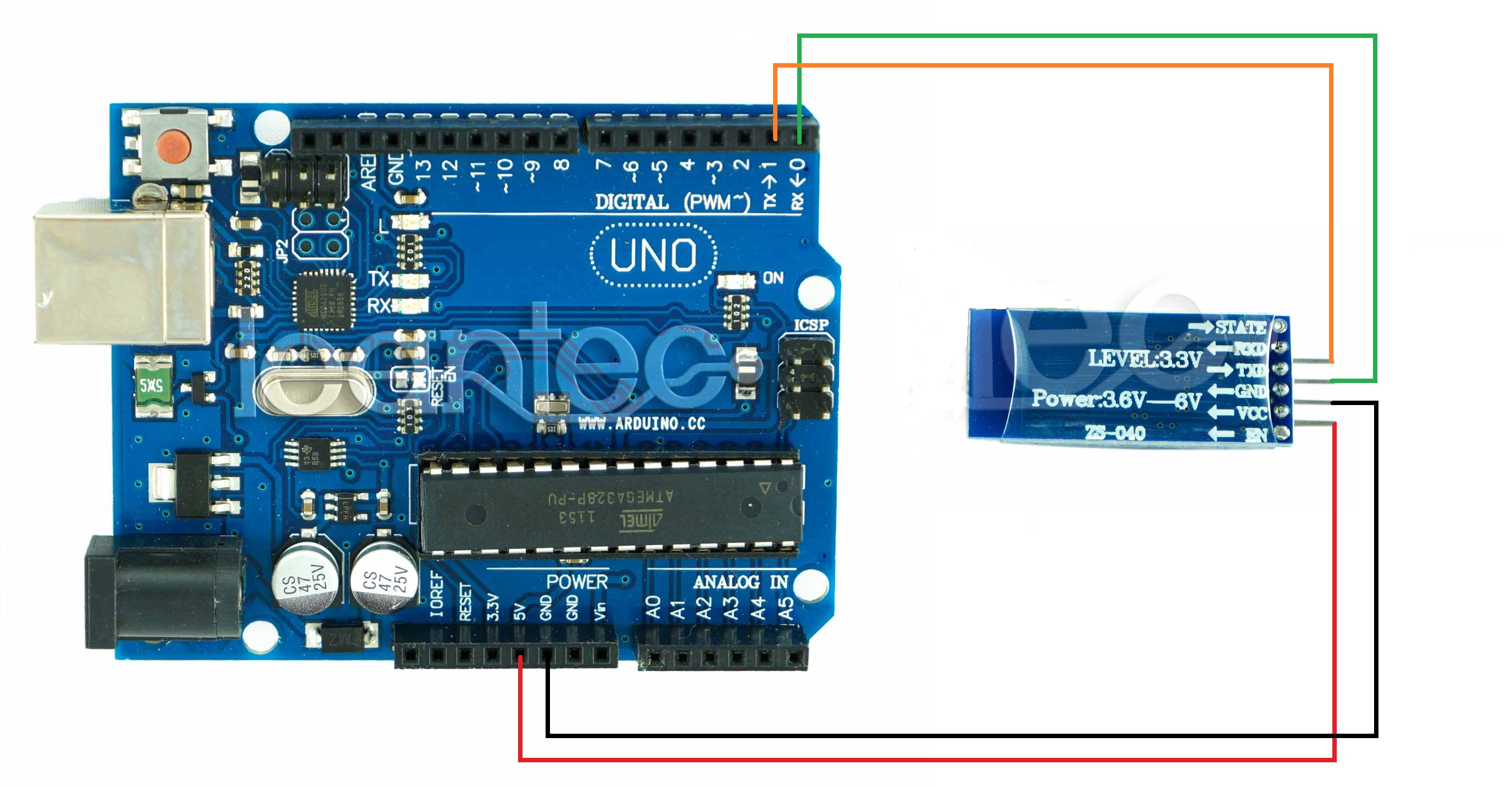
Esquema de conexión del módulo bluetooth HC-06 y conexion utilizando la placa de 170 contactos.
Aplicación bluetooth para el control del robot LRE-BTH2 y BTH4.
En este ocasión hemos elegido una aplicación desarrollada por una asociacíon de robótica educativa con la que colaboramos y trbajamos, kiwibot. Para conocer más sobre esta asociación pincha en el siguiente enlace.
Funcionamiento de la aplicación.
Para conseguir la aplicación solo hay que buscarla en Googel Play de Android con el nombre de Kiwibot.
El funcionamiento de la aplicación es bien sencillo. Cada vez que pulsamos algunos de los botones de dirección, envía una letra a nuestro módulo bluetooth HC-06. A su vez el HC-06 envía dicha letra a Arduino por puerto serie y Arduino la interpreta para hacer la acción correspondiente a la letra recibida.
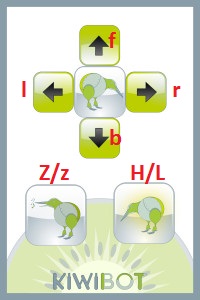
Cuando no hay ningún botón pulsado la aplicación envia la letra S.
Código
El último paso para terminar el montaje de nuestro kit LRE-BTH2 y BTH4 es cargar el siguiente código en nuestro Arduino.
// Incluimos la librería de los motores #include <LEANTEC_ControlMotor.h> // Configuramos los pines que vamos a usar ControlMotor control(2,3,7,4,5,6); // MotorDer1,MotorDer2,MotorIzq1,MotorIzq2,PWM_Derecho,PWM_Izquierdo int incomingByte; //Último bit recibido int velocidad=255; //Variable para la velocidad del robot void setup() { Serial.begin(9600); //Establece conexión con el puerto serie } void go_forward(){ //Función para que el robot avance control.Motor(velocidad,0); // Movemos el robot a la velocidad seleccionada y el giro calculado } void go_back(){ //Función para que el robot retroceda control.Motor(-velocidad,0); } void turn_right(){ //Función para que el robot gire a la derecha control.Motor(velocidad,-100); } void turn_left(){ //Función para que el robot gire a la izquierda control.Motor(velocidad,100); } void parar(){ //Función para que el robot se detenga control.Motor(1,1); } void loop() { if (Serial.available() > 0) { //Si recibe datos, incomingByte = Serial.read(); //Acumula el último bit en incomingByte if (incomingByte == 'b') { //SI es “f” (botón de arriba), go_forward(); //Va hacia alante } if (incomingByte == 'f') { //Si es “b” (botón de abajo), go_back(); //Va hacia atrás } if (incomingByte == 'r') { //Si es “r” (botón de la derecha); turn_right(); //Gira a la derecha } if (incomingByte == 'l') { //Si es “l” (botón de la izquierda), turn_left(); //Gira a la izquierda } if (incomingByte == 's') { //Si es “s” (no se pulsa nada), parar(); //El coche se para. } }// availabe }//loop